
Buenas a todos chicos!! Hace ya tiempo que no escribimos (y con escribimos quiero decir escribo) acerca de la importancia de la seguridad física. La última vez que hablamos de ello fue en fechas muy similares del año pasado. La entrada anterior acerca del Fartometer me consta que tuvo bastante éxito, y varios de vosotros me habéis preguntado por la siguiente entrega. ¡Pues aquí estamos!
¿Quién no se ha visto en la situación en la que debes dejar el puesto de trabajo desocupado con temor? Alguien podría venir e intentar desbloquear el ordenador usando la contraseña que hemos dejado en el postit en el monitor. O podrían cambiarnos la silla por la que cojea. O incluso sumergir nuestra grapadora en gelatina, y eso si que no.
La misma situación podemos encontrarnos en el caso de que estemos en una CON haciendo el CTF y no queramos tener que desmontar el tinglado del portátil, la cerveza el redbull y el bocadillo. Podemos dejar a un compañero cuidando las cosas. Pero seamos sinceros. No nos fiamos. En el CTF y en el amor vale todo.
La inteligencia artificial, por muy limitada, es nuestra aliada en estos casos. Vamos a desarrollar un sistema detector de movimiento, controlado con un Arduino Nano, que reaccione de forma significativa cuando detecte la presencia de un indeseado.
Ingredientes:
- Arduino Nano v3, con el ATMEGA328.
- Una breadboard (para el prototipado y, si eres comodón, el montaje).
- Sensor PIR (utilicé HC-SR501).
- Zumbador pasivo.
- Dos motores de corriente continua (DC). Tened en cuenta que el voltaje que entrega el arduino son 5V, así que por esas cifra moveos. Siempre que no sea mucho mas o menos, deberían servir. Los vamos a poner en paralelo para no gastar dos integrados (ver a continuación) y dado que no necesitamos mucha potencia de giro.
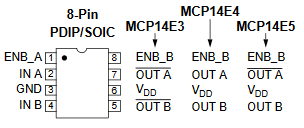
- Un circuito integrado MCP14E4-E/P o similar que permita manejar los motores. Aquí tenéis un esquema del integrado sacado de la documentación:
- Se puede observar por qué pin entra la corriente (Vdd) y sale a tierra (GND). Por los pines IN-A e IN-B entran las señales de control digitales para que el motor vaya hacia delante y hacia atrás, con el motor conectado a OUT-A y OUT-B. Las entradas ENB_A y ENB_B son de control de velocidad, pero en este caso no las tocaremos.
- Dos leds rojos, con dos resistencias (470 Ohmios o similar).
- Cable, mucho cable. Si tenéis de varios colores, por experiencia, menos lío.
- Regletas de electricista si prefieres, como yo, empalmar cables con ello. Es más sencillo y fácil de sustituir y reparar. Si no, toca soldar más. Si las usas, necesitarás destornillador de electricista (o tamaño similar).
- Un cable USB a miniUSB para la programación y la alimentación a posteriori. No lo alimentaremos con baterías porque 1. en teoría se va utilizar enchufado a un portátil normalmente, 2. por poder se puede enchufar a una batería portátil, y 3. por ahorrar, coñe.
- Cartón pluma y termoencoladora para hacer la carcasa. Otra opción es, por ejemplo, Lego.
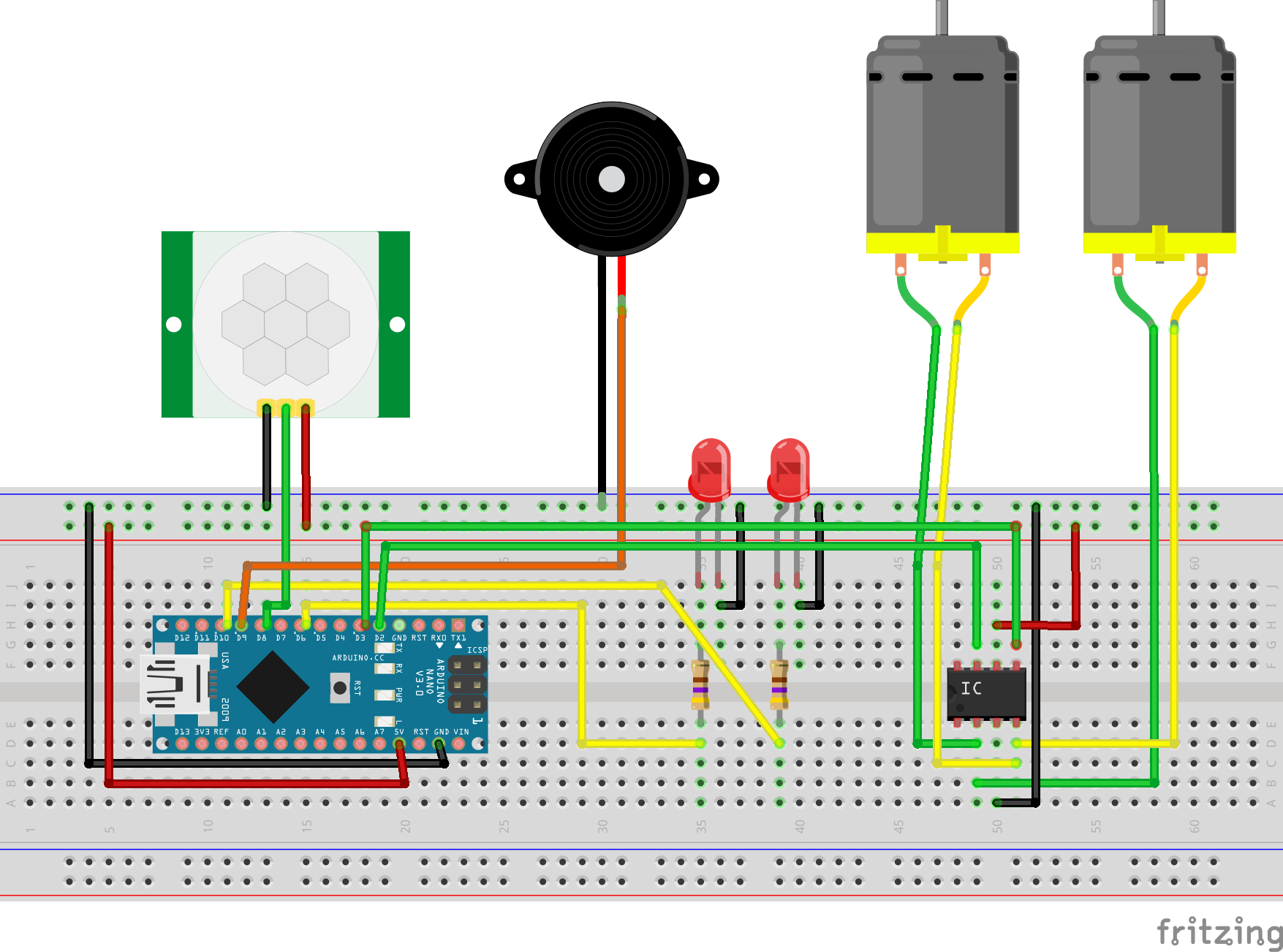
El montaje quedaría de la forma siguiente:
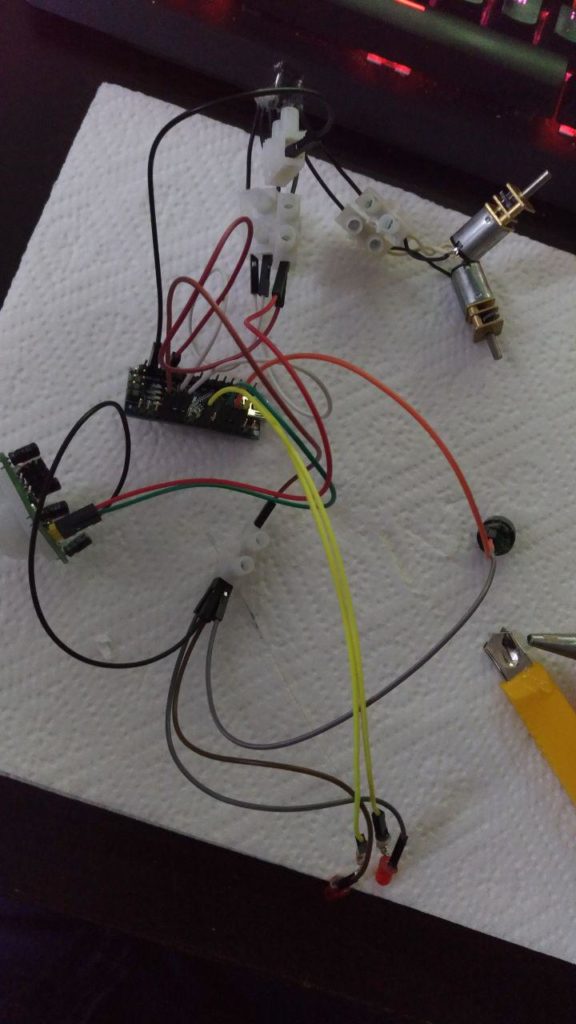
En este punto, el montaje depende mucho de vosotros. Podéis hacerlo con ayuda de las regletas de electricista como os comentaba más arriba o echarle valor y soldarlo todo. Usar una (mini)breadboard para enganchar todo o ir a las bravas como yo (aunque sea porque os veáis sin una minibreadboard como me vi yo). Up to you. Así tiré yo:
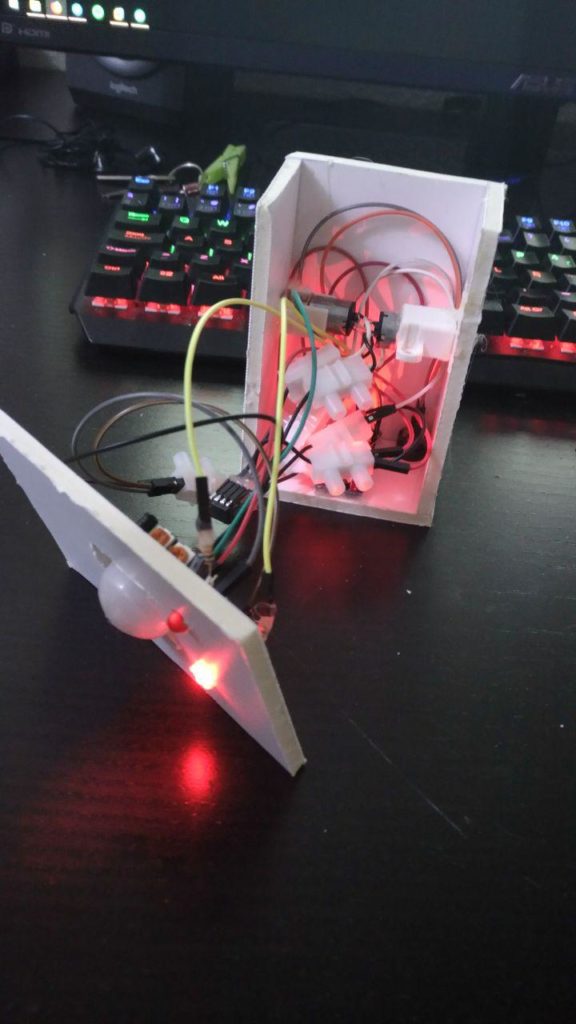
Podéis personalizar el sistema como queráis. Me planteé seriamente montarlo como (o más bien en) una caja de galletas. Pero esto no resulta amenazante. Ni tampoco pega con la temática. Es un detector de movimiento que debe intimidar al intruso. No se me ocurre una mejor alegoría al tiranosaurio rex.
El cartón pluma, para estas cosas e igual que en la entrada anterior, es vuestro aliado. Y los rotuladores también. Yo pinto mi mundo. Alpino.


Y aquí un pequeño vídeo de mi hijo en acción. Yo tengo que quererlo igual. Recordemos que el arte no es tanto la técnica como lo que se quiere expresar con ella. Y yo quería expresar un tiranosaurio que grita y agita los brazos si ve movimiento. Yo diría que es un éxito.
Os dejo el código en Github, así como el fichero de sketch para Fritzing de la imagen de arriba. ¡Espero que os haya gustado! No viene mal recordar de vez en cuando que en la madriguera estamos de la puta cabeza 😀
PD: No te vayas sin leer la entrada anterior! https://www.fwhibbit.es/seguridad-fisica-deteccion-activa-de-metano-le-fartometer
Un comentario en «Seguridad física – Detección de presencia mediante uso de tiranosaurio»
En vez del zumbador podría tener un motor normalito de los baratos con unas palas de cinta que golpeen el cartón pluma para hacer un ruido raro. A la gente le da miedo los ruidos raros.
No había leído el Fartometer, pero llevo riendo un buen rato. Qué proyectos más majos. xDD
Los comentarios están cerrados.